-
Single cycle datapaths have only one instruction in the datapath at a time.
-
Not all stages of a datapath are used at the same time.
-
So we can do stage-by-stage pipelining. Having multiple instructions in the datapath, but at different stages, to increase throughput.
-
Now, instead of the clock frequency being limited by the critical path of slowest instruction, it’s now limited by the critical path of the slowest stage.
-
1 stage per clock cycle.
-
Split the datapath and add registers between each stage to hold a signal until next clock cycle.
Control Signals
- Multiple instructions in the datapath at the same time, can’t just generate and forget.
- Eg: the control inputs into EX will be for instruction 1 vs the control inputs into regfile may be for instr 2.
Two approaches:
- Generate the control signals at each stage.
- Generate the control signal during instruction decode and forward them along with the decoded instruction. ==
<-- we do this==
List of changes
dest_addrinput into theregfilenow comes from therdfield from the WB stage.- By the time an instruction’s WB stage comes along, some other instruction will be in the IF/ID stage.
- The regfile can read and write from different addresses in a single clock cycle.
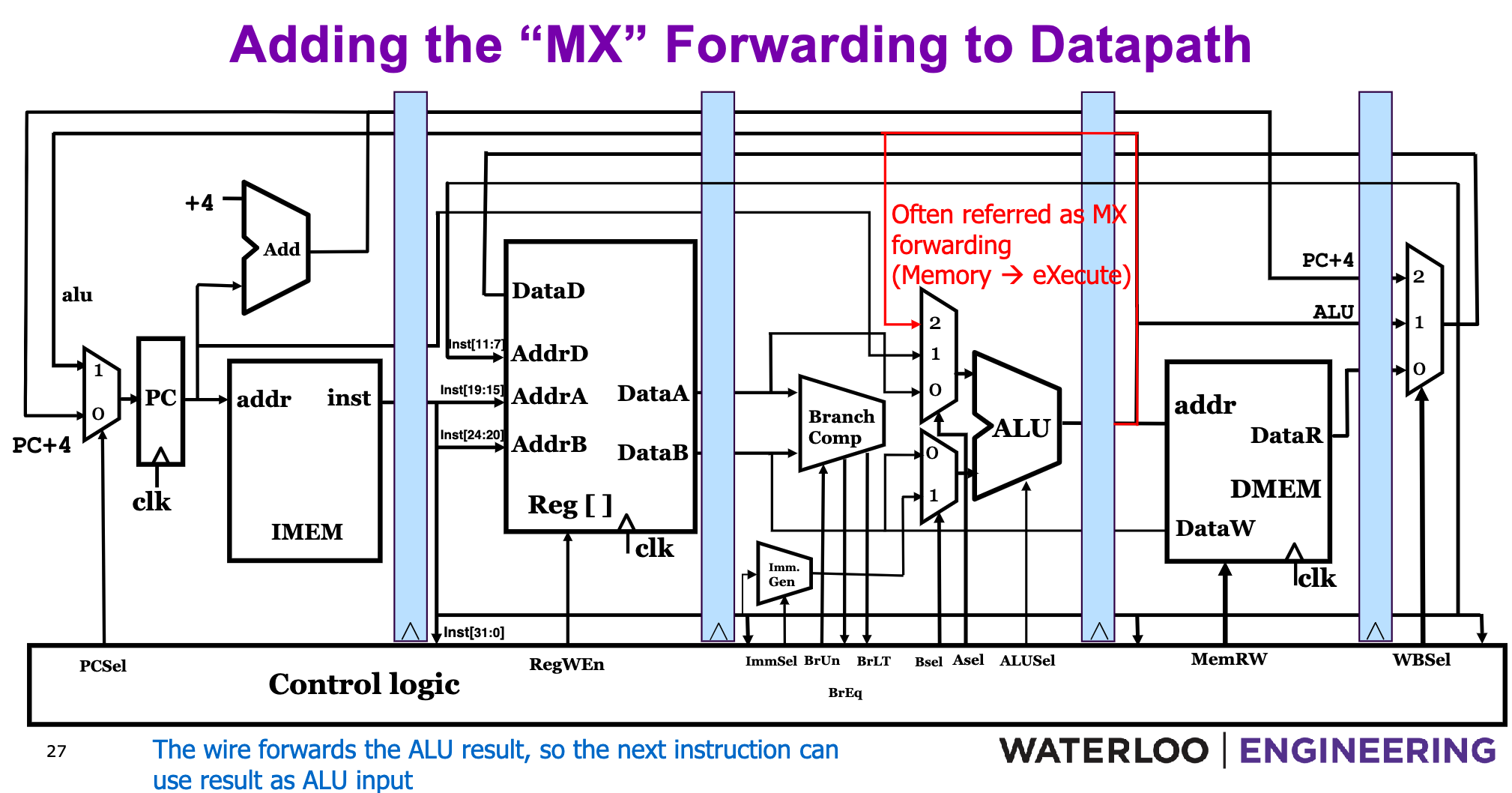
- MX Forwarding: alu output directly into ALU input.
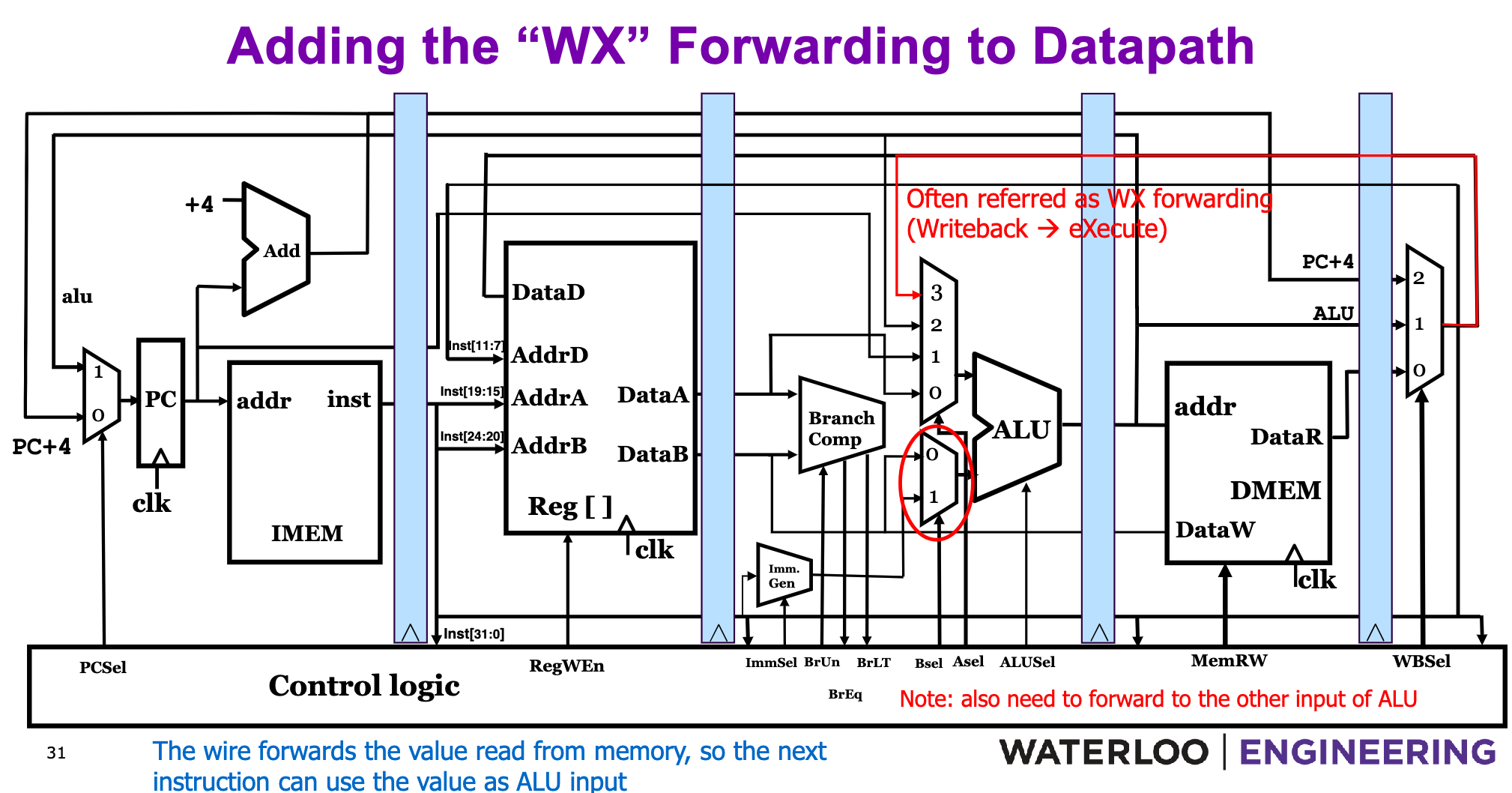
- WX forwarding: DMEM output directly into ALU input.
- WM forwarding: DMEM output directly into DMEM input.
- Instruction scheduling for replacing
nopswhen loading. - Branch prediction (naive for now).
Pipelining Hazards
Structural Hazard
- A required resource is busy and needed in multiple stages.
- Solutions:
- Instructions take turns/wait to use it.
- Add more hardware.
- Design ISA to prevent hazards - RISC-V way.
Regfile
- regfile in riscv has separate ports for reading multiple registers.
- Hypothetical issue: what if an instruction needed to write to two registers?
Memory
IMEMandDMEMwill almost certainly need to be accessed together. While accessed separately, they are the same physical memory.- Solutions: stall or abstractions (caches) to make it such that they both appear/function more like separate mems.
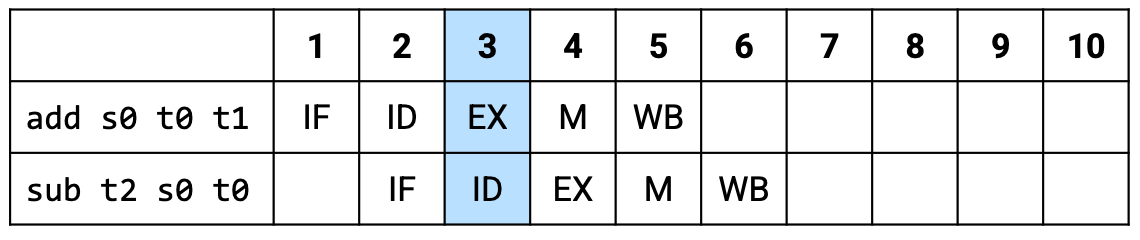
Data Hazard
 Issue:
Issue: sub reads regfile at t = 3 and add writes to the regfile at t = 5.
Stalling
- The following instruction so that it reads from regfile after WB of the instr it depends on.
- This is done by adding
nops1 to the code. Instructions where nothing happens. - The delay is cascaded to all following instructions.
MX Forwarding
- Instead of waiting for WB and then reading from the regfile, we can try reading from the stage the value is calculated.
- The earliest stage where we know the value of
s0is EX (T = 3). - We can add hardware to forward the value directly to
sub’s EX (T = 4). - This is called MX forwarding (M → EX). Changes:
- More wires.
- Wider muxes, since we have more inputs to select from.
- We need extra logic to check if we need forwarding.
Forwarding Condition
- Forwarding is done when one of the source registers of an instruction is the destination register of the previous instruction.
- We also ignore writes to
x0.
WX Forwarding

- WB is too far along anyway.
- But,
t0receives the value after M stage (T = 4) andaddneedst0at T = 4 for EX. - Even with forwarding we need to stall for one cycle.
Scheduling
- Instead of inserting
nopsto stall instructions. - We can intelligently rearrange instructions such that some instructions which don’t rely/cause hazards can be placed after hazard-causing instructions.
- So we still get work done in those dead cycles instead of
nop.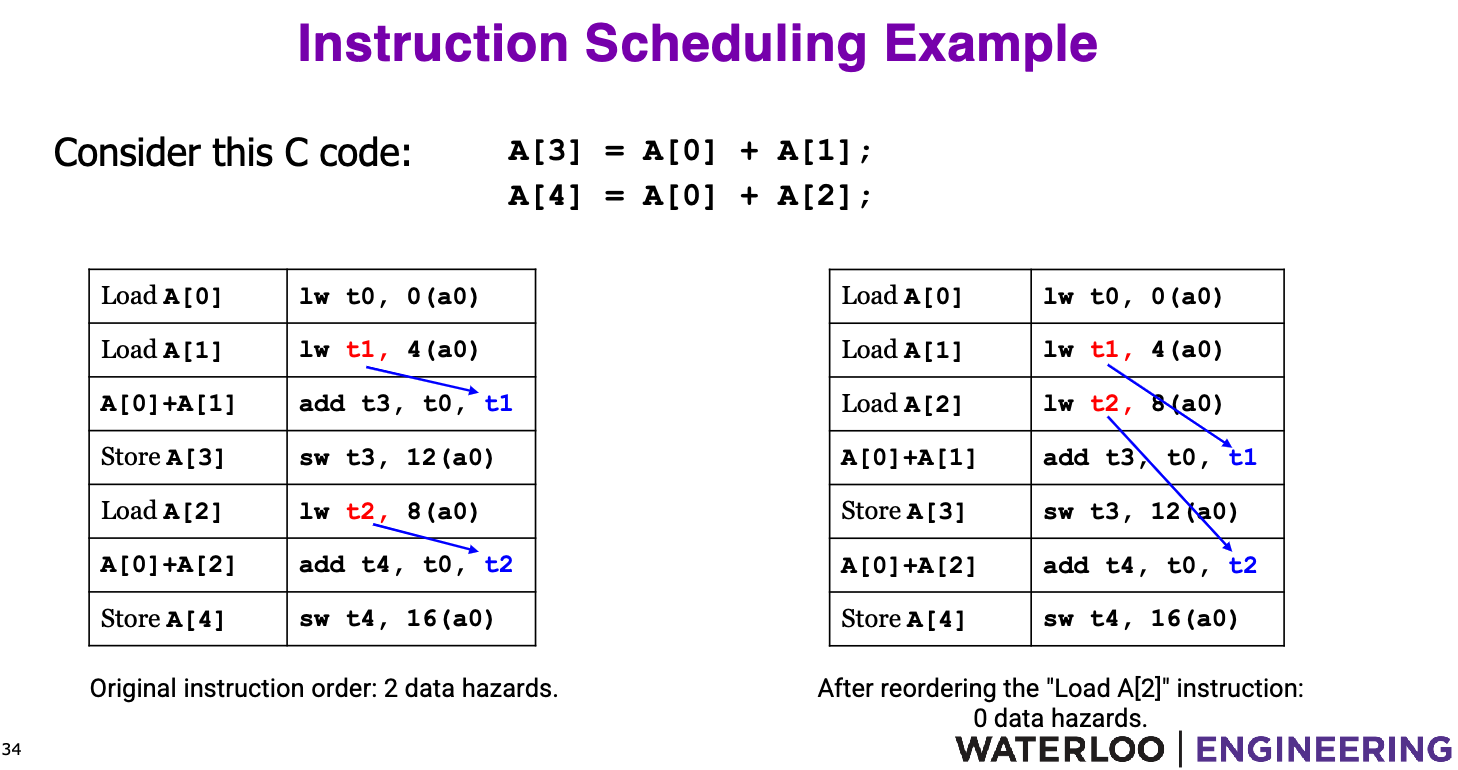
- Here each of the load instruction would require a stall after it (along with WX forwarding).
- Instead of inserting a
nopafter each one, we see that the relevant registers do not cross-interact. The secondlwdoesn’t depend on updated registers. - So we move the second load to right below the first load. The second load replaces the first
nopand theaddreplaces the secondnop.
Control Hazard
- Branch instruction determine the control flow of the program.
- The next instruction depends on whether the branch was taken or not.
- We get the result for the next PC after the EX (3rd) stage. By this time, two instructions have already entered the pipeline.
- If the branch is taken, we have to flush the pipeline by conventing those instructions to
nops.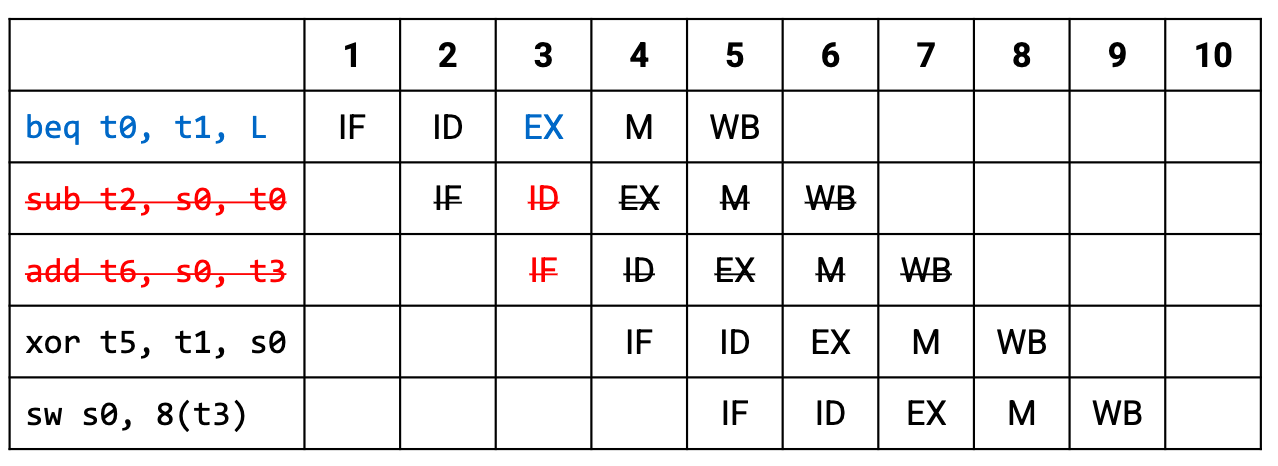
- We can try branch prediction! Naive prediction: branch is not taken.
- More depth in upper years.
Footnotes
-
nop <=> addi x0, x0, 0↩